>>> Click here to access this episode of the Syllab Podcast on Spotify <<<
a) Rotary wings
The advantages of helicopters over airplanes are very obvious, they don’t need a long runway to land and take-off, in fact they don’t need any, just a large-enough and horizontal-enough clearing for the landing skids to rest. The drawbacks are obvious as well, they can’t travel as fast or as long, can’t carry as many passengers or as much cargo, and they are noisy and not very comfortable due to vibrations. In other words, they have a totally different use case including rescue missions, landing on oilrigs, conveying rich tycoons to the top of skyscrapers and, of course, military missions.
The central idea of a helicopter is similar to hydrofoils: it is to generate vertical lift by creating a pressure differential between foils or blades. Different fluid, same physics. In the case of the helicopter, this is made possible by having the engine produce a rotational mechanical movement, same as with a locomotive (refer to S5 Section 1.a), or with a car (see S5 Section 2.b on the combustion engine and transmission). So, as the blade rotates increasingly faster, the pressure differential created by the angle of attack, which is the angle or “pitch” with which the blade penetrates the fluid, creates an increasing lift force able to allow for a vertical take-off followed by a landing when the rotational speed decreases. What about the other degrees of freedom, left-right and forward-backward?
Theoretically it is simple enough: change the angle of attack of the blades to change the lift vector and effectively create thrust in the desired direction. Mechanically it is more challenging clearly, but that is what happens. An element called swashplate tilts the blades down towards the intended direction of travel – I have included a link to the relevant Wikipedia entry in section g) if you wish to better appreciate the nuts and bolts involved. This explains why the front of a helicopter tilts down after taking off when the pilot seeks to move forward. A problem arises however, because changing the plane of rotation of the blades effectively alters the angle of attack and decreases the lift; this must therefore be compensated for by simultaneously increasing the pitch of the blades. Thus, tilting the swashplate in one direction will create acceleration through tilt and this acceleration can be increased by pushing up the revolution rate of the rotor. At cruising speed, the craft can likewise be maintained horizontally by compensating the incline with a slightly increased angle of attack of the blade. Thrust and lift into one device. A real balancing act for the pilot.
When it comes to decelerating or braking, it is a matter of applying reverse thrust, i.e. tilt the rotor backward a little so that the thrust is now towards the back of the craft and this will slow it down as much as required. Hence, the only brakes involved on a helicopter are those to slow the rotor after landing, in order to accelerate the shutdown procedure for safety reasons.
If you followed closely the above description, you may have realized the torque applied through the shaft to the rotor blades would result, by reaction, in a torque experienced by the body of the helicopter in the opposite direction. In order to avoid the crafts spinning uncontrollably, they are outfitted with a tail at the end of which a tail rotor is mounted vertically. The blades of this rotor generate horizontal thrust in the direction of rotation of the main rotor, which is the opposite of the torque experienced by the fuselage. Now you start getting a sense of what can go wrong in a helicopter.
There are a few alternatives to the tail rotor, the main ones being as follows:
- Having two main rotors rotating in opposite direction so that the respective counter-torques are offset. These can be mounted at the front and back for tandem rotors, those are used for heavy lifting operations for example, or side by side, a little like the propellers of an airplane but with a horizontal plane of rotation, this is the transverse rotor configuration.
- Mount the two rotors with opposite rotation one above the other, on the same axis. This is the coaxial design and the main benefits are symmetry of lift and not having to expand energy into a tail rotor while the main drawback is additional mechanical complexity and a more sophisticated flight control system.
- Get the blades to turn not by rotating a shaft but by thrusting compressed air through nozzles placed at the tip of the rotor blades. This also does away with the need to have a transmission, the gearing required to dissociate the engine shaft revolutions from those of the main rotor. Unfortunately, this is quite inefficient from a thermodynamics perspective so not much payload can be carried, fuel included, thereby restricting the flight range.
- We will look at the quadcopter in the context of drones in section d).
b) Piloting a chopper
We now understand the mechanics so it is time to look into the controls, the interface between the pilot and the machine. At take-off, the rotors will be made to spin and this speed can be controlled by a throttle lever or twist-grip; for a combustion engine, this allows more air and fuel in the combustion chamber and more power to be delivered through the shaft to the rotors.
Besides the number of revolutions per minute (rpm) of the main rotor, the amount of lift can be increased by accentuating the pitch of all blades simultaneously, and conversely it can be reduced by bringing down the pitch. The control for this is a lever suitably called “collective”, because the pitch of all blades is adjusted collectively.
The accelerating spin of the main rotor will produce counter-torque in the main body so, using foot pedals, the pilot will adjust the sideways thrust created by the tail rotor to offset this force. This can also be used to impart left-right rotation (that would be the yaw) and directionality during manoeuvring.
To induce roll (sideways rotation) or pitch (forward-backward rotation), a joystick is used. After take-off, if the pilot wishes the helicopter to move forward then she will push the joystick forward and offset the loss of altitude by pulling up on the collective.
Finally, when faced with a loss of power, a plane might be able to glide and soft land but for a rotorcraft this certainly looks more challenging and potentially catastrophic. Recall however that the pitch of the blades is such that in case the engine stops and the helicopter starts descending, the air will apply pressure on the blades. By disengaging the main rotor from the engine thanks to a clutch called the “freewheeling unit”, this pressure will force a rotation of the blades free of counter-torque in the helicopter frame, making a controlled descent possible. When this happens, the collective should not be pulled up because the resulting increase in lift and drag could stall the blades so, instead, the rotorcraft is made to glide forward, always losing altitude, until a few seconds before landing when the stored kinetic energy of the rotor blades will be traded into lift by pulling on the collective and enabling a soft landing. There is no second try.
In view of the above, you can only imagine what it takes to seamlessly hover above a fixed point on the ground. Thus, there is a strong case to say that piloting a chopper is an art, even though deep down science can explain it all.
c) Dreams of eVTOL
VTOL refers to vertical take-off and landing aircraft and the “e” in front stands for electric. The combination of technological advances in electronic controllers and automation, electric motor efficiency, and electric batteries and fuel cells could herald a revolution in urban mobility in the form of eVTOL aircrafts. These would open up the third dimension of space for transport within cities, and therefore make possible gradient separation without the associated cost of building large, costly and unsightly multi-level land transport roadways or railways.
To be sure, such deployments and operations in populated areas with several aircraft taking to the skies in a relatively narrow volume by the current standards of air travel, will necessitate the construction of take-off and landing infrastructure as well as new rules, signalling and very efficient air traffic control to avoid collisions. Clearly, at scale, this coordination seems beyond the ability of mere humans. This may not be a showstopper for very long considering the progress being made in the development of autonomous navigation system for cars and trucks and the aircraft would not only benefit from much more capable pilots, absorbing and processing more data, able to genuinely multi-task, but also from aircraft-to-aircraft communication through radio waves and additional hardware installed for this purpose within city centres.
In terms of physics of flight, there are three main solutions capturing the most interest besides an electrically-powered helicopter. One is the quadcopter used by drones that we will look at in the next section. The second one is combining the vertical lift ability of rotors with the cruising efficiency of wings and jet or propeller engines. The third is a hybrid propeller-rotor system where thrust can be directed downward or horizontally, or in between as required, either by tilting wings or the rotors themselves – the technical term for this set up is “vectored thrust”. Very likely it won’t be a winner-take-all race as each technology has its relative advantages and drawbacks across characteristics such as manoeuvrability, thermodynamic efficiency and therefore payload capabilities, comfort, and speed.
Ignoring for a moment the obstacles to deployment relating to the lack of appropriate regulation and vertical airports infrastructure, the main technological challenges for eVTOLs include a mix of unique aspects particular to the operation of aircraft in a high-density environment (people and other aircraft) and more traditional ones shared with other established modes of air travel. In the latter camp, there is the issue of battery and fuel cell weight, motor efficiency, and cost of the battery, motor and lightweight materials. VTOL-specific issues include the noise emission and the development of autonomous systems, including the collision avoidance capabilities. The reason autonomous systems are so central to eVTOLs is threefold: pilots add operating costs, they are effectively non-revenue generating payload, and they may need to be trained for different types of aircraft propulsion and control systems.
All things considered, the commercial perspectives still warrant the push towards making these aircraft a reality. My personal view is that there are four obvious non-niche markets for eVTOLs:
- An alternative to private transport and taxi, for single or small groups of individuals. Choose your pickup location and destination, or the vertiports closest to those.
- Delivery of time-sensitive cargo. To hospitals for example rather than for ecommerce.
- Public transport service that is more expensive but provides a premium service with shorter and faster routes obeying fixed schedules.
- Providing the missing link in intermodal transport and transfers, whether it is from home to airport, between train stations, between airports, or from an airport to a train station, pick your combination.
In addition, one could imagine these aircraft may also play a role in the construction industry, such as the construction of bridges or skyscrapers.
d) Drones
Technically, the term of drone refers to an unmanned aerial vehicle and doesn’t specify the type of propulsion, whether fixed-wing or rotor, nor whether the system is autonomous or controlled remotely.
The most popular version for consumers, as a tool to capture video or photography content from aerial perspectives, is the quadcopter – which is a small helicopter with four equidistant rotors forming the corners of a virtual square. As we have seen in section a), the pairing of blades rotating in opposite directions cancels out the counter-torque effect on the frame and having two pairs provides more stability than just one. The standard configuration features rotors placed opposite each other turning in the same direction with yaw (the left-right rotation on a horizontal plane, like saying “no” by moving one’s head laterally) created by reducing the thrust of one of this opposite pair compared to the other one. If on the other hand increased thrust is applied to only one rotor or two adjacent ones, then a lateral asymmetry is created and the drone can be made to roll (like swaying from one leg to the other) or pitch (rotation in reference to the vertical axis, like saying “yes” with one’s head).
These quadcopters are remotely controlled but they also have some degree of autonomy and can follow preset routes, including landing at a specific spot on their own. It is the same for delivery drones used by logistics companies for parcels with limited payload, they can be fully or semi-autonomous. In fact, we can expect they will become a common sight very soon for mail delivery as well as freshly cooked food, from restaurant to your doorstep or balcony.
On the battlefield or for intelligence missions, drones are already very much a military reality and the quadcopter version can be used in swarms both for defensive purpose by acting as shields against weapons and as offensive payload-delivery machines carrying explosives and overwhelming traditional defensive systems through their sheer number and agility. For surgical strikes deep into enemy territory and intelligence missions, the fixed wing format is generally preferred as it provides superior speed and range.
e) Lighter-than-Air
In S5 Section 3.e on modern sailing technologies, we saw that engine-powered watercraft were looking to use sails, including kites and hard sails, to produce lift and therefore reduce water friction. The same idea also makes sense for aircraft: combine a propulsion mechanism with a lifting device. The result is variously called an airship, lighter-than-air aircraft or aerostat.
Nothing new under the sun as, from the mid-19th century onward, the design bifurcated away from the hot air balloon, which we will investigate briefly in section g), to adopt a much more streamlined profile and more powerful modes of propulsion. The turn of the 20th century saw the ascent of the first Zeppelin model with the crew hanging in a gondola that eventually gave way to more comfortable cabins. In the meanwhile, the airships became a military craft able to act as bombers during WW1 but by the time WW2 came around their role became more defensive, acting as boat escorts and for patrolling craft – in particular they were good at spotting submarines and trying to damage them by dropping depth charges.
The size of those airships grew to reach startling volumes, as much as 245m in length and 41m in diameter for the LZ 129 Hindenburg. Figure 3 below provides a visual comparison of the size of the craft compared to some of the largest commercial planes in use today, including the double-decker Airbus A380-800 (in pink, 73m long) and the Boeing 747-8 Intercontinental (in blue). This was the peak in many ways and it all went crashing down quickly after this very Zeppelin craft burst into flames, an accident captured by the still relatively new video technology. Not the type of advertisement one is looking for and this marked the end of passenger transport by airship, or nearly so. Until now.
Figure 3: Comparison of the largest airship Vs the largest planes
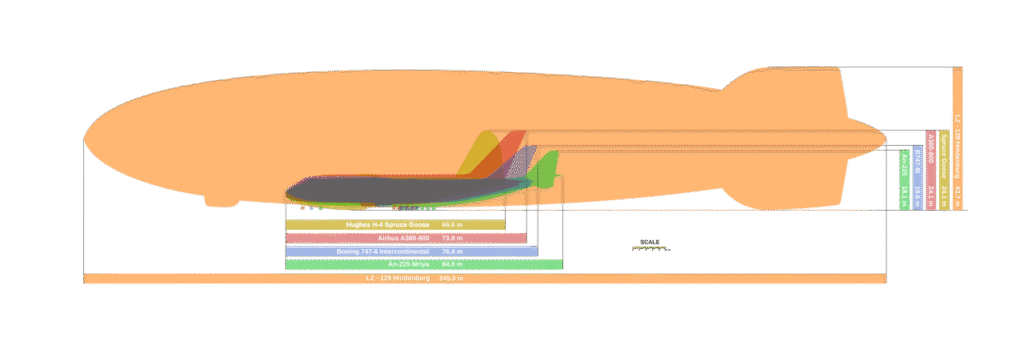
Credit: Clem Tillier (CC BY-SA 2.5)
The reason for the disaster is intrinsically linked to the lack of optionality when it comes to providing the buoyancy underpinning lighter-than-air (LTA) craft – I include a link to the Wikipedia entry for buoyancy at the end of this chapter if you wish to better understand this concept. Earth’s atmosphere is not very dense so this calls for a lifting gas that is less dense and practical in that it is neither toxic nor too flammable, which rules out methane, coal gas and, one would think, hydrogen. Ruling out is not the appropriate term however, it is all about trade-offs and hydrogen is plentiful and the lightest of all gases with only 7% the density of our atmosphere. Thus, it is not surprising it would be used in spite of the risk and, unsurprisingly, the Hindenburg was filled with hydrogen.
So, hydrogen should not be ruled out but requires proper handling, and the other options are helium and hot air. The latter is then called a thermal airship; they are inexpensive to produce and operate, however they can’t lift much payload (about a third of the hydrogen or helium-filled equivalent) and for this reason their superstructure and control mechanisms need to remain very light, making them less manoeuvrable. In comparison, helium is only about twice as dense as hydrogen so it provides good lifting capabilities and it is not easily combustible. Nonetheless, while abundant in our star and the gas giants, it is rare and expensive to produce on our planet.
Moreover, there are other issues to address besides safety and cost, and one of them is the fact that hydrogen molecules (H2) are incredibly small and therefore easily diffuse through non-rigid materials, a situation even more acute for single helium atoms. Consequently, the type of materials used for the envelope containing the buoyant gas is a key factor in the airship equation. In this respect, new petrochemical materials or carbon fibre can be used, as well as lamination, and the structure can be fully elastic or rigid, or a hybrid of those.
For propulsion, the new generation of airships could be using hydrogen, fossil fuels or electrical batteries and rely on either propeller or the vector thrust technology mentioned in section c). There remain technological challenges but the ongoing improvements in materials, propulsion efficiency and control instrumentation suggest airships could make a strong comeback – and this because there is a market for them.
f) The markets for airships
Airships are not fast, but they are not slow either with expected operating speed ranges of up to 120-150km/h. They have more distance range than an eVTOL, and they can pick-up, lift and drop payload vertically without the need for significant infrastructure. And they probably can operate with much greener credentials than airplanes, helicopters or eVTOLs.
This opens up natural markets for cargo operations in remote parts of the world lacking traditional road or air access, including zones stricken by natural catastrophes or ravaged by military conflicts – something the new players in the arena are keen to mention in order to enjoy the positive publicity that comes with it even though choppers do also provide a ready alternative.
A larger revenue opportunity lies with temporary operations such as construction projects requiring hovering capabilities and some heavy lift. In that case, hybrid airships with some powered lift ability added to the gas buoyancy may be a good technological option.
More speculatively, once the lifting capabilities improve, possibly with the assistance of quadcopter-style rotors, the airships could facilitate launches into orbit by bringing rockets to a higher altitude where they would experience much lower atmospheric drag and they would not need to embark as much fuel, thereby drastically improving the amount of payload they can carry.
For the consumer market, the attraction is very clear and we can imagine two business lines. The first would compete with other modes of transport for shorter ranges, up to 200-300km, and could operate in areas without proper train service or without airport in close proximity. The other would be an altogether different way of travelling, enjoying an unusual perspective, like that provided by drone footage. It could be a half-day cruise with lunch or dinner or it could be a multi-day route, like an overland cruise aboard a small size yacht with stops on the way. Personally, I would love that.
g) Trivia – the hot air balloon
The hot air balloon is the simplest manifestation of an LTA aircraft: a basket, a source of heat and an envelope to retain the heated air providing buoyancy to the entire structure. Simple and, as expected, first in line in terms of experimentation with the first manned flight occurring in 1783 with the Montgolfier brothers for a full 10 minutes (in France a hot air balloon is called a montgolfière). Eleven years later, it was already put to military use as an observation tool.
In terms of operation, a burner using liquid propane directs the heat in the form of a flame towards an opening at the bottom of the envelope and this heated air rises and pushes up within the envelope, typically made of nylon, thus providing lift. The amount of lift is a function of the temperature difference between the air within and without so, for night flying, hybrid models can be used with a lighter-than-air gas such as helium heated to provide lift at all hours. This was the set up used by adventurers Piccard and Jones when they circumnavigated the globe in a balloon in 1999, the first such non-stop journey.
The main drawback of this aircraft is the limited steering capabilities and motion is essentially at the mercy of the winds so that navigation is achieved by hitchhiking different airstreams. For landing or more generally losing altitude, just swich off the flame or release some hot air using a flap mechanism.
h) Further reading (S5C6)
Suggested reads:
- Five Weeks in a Balloon, by Jules Verne (buy)
- Wikipedia on Swashplate: https://en.wikipedia.org/wiki/Swashplate_(aeronautics)
- Wikipedia on Buoyancy: https://en.wikipedia.org/wiki/Buoyancy
Previous Chapter: Airplanes
Next Chapter: Roads & Railways